
This summer, Professor Tomáš Vyhlídal, Research Area 1 Lead at ROBOPROX, delivered a plenary lecture at the international IFAC SSSC TDS COSY 2025 conference. His talk highlighted innovative approaches to vibration suppression using time-delayed feedback, a field in which his research group spread across the Faculty of Mechanical Engineering and the CIIRC at the Czech Technical University in Prague (CTU) has been active for many years and has achieved internationally recognized results.
Under the title “Optimized Active Vibration Absorbers with Time-Delayed Feedback for Non-Collocated and Multi-Dimensional Applications,” Professor Vyhlídal revisited the classic Delayed Resonator concept for vibration absorption, originally introduced in the 1990s, and presented its modern extensions developed within ROBOPROX and Czech Science Foundation projects.
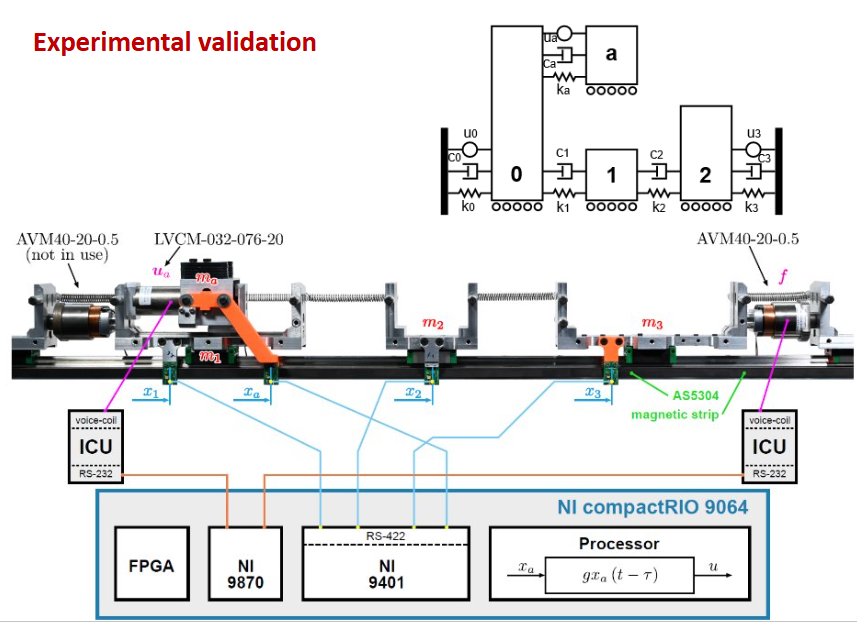
He explained how introducing a precisely tuned time delay into a feedback loop allows a physical absorber to behave like an ideal resonator, completely neutralizing unwanted vibrations at a selected frequency. The lecture explored how this principle can be scaled from simple systems with a single sensor and actuator to complex, multi-input, multi-output (MIMO) systems.
A particularly exciting part of the presentation focused on non-collocated vibration control —that is, suppressing vibrations in target part of a structure using actuators located elsewhere. Professor Vyhlídal demonstrated optimization-based designs for a planar vibration absorber with three actuators and shared early experimental results for a spatial absorber using six actuators controlled by delayed feedback.
Beyond the theoretical advances, the talk emphasized practical benefits, which is that time-delayed feedback can outperform traditional proportional-derivative (PD) control, requiring only a single measurement while compensating for internal delays in the system. These methods also enhance mechanical stability and reduce material fatigue, key factors for future smart robotic and mechanical systems.