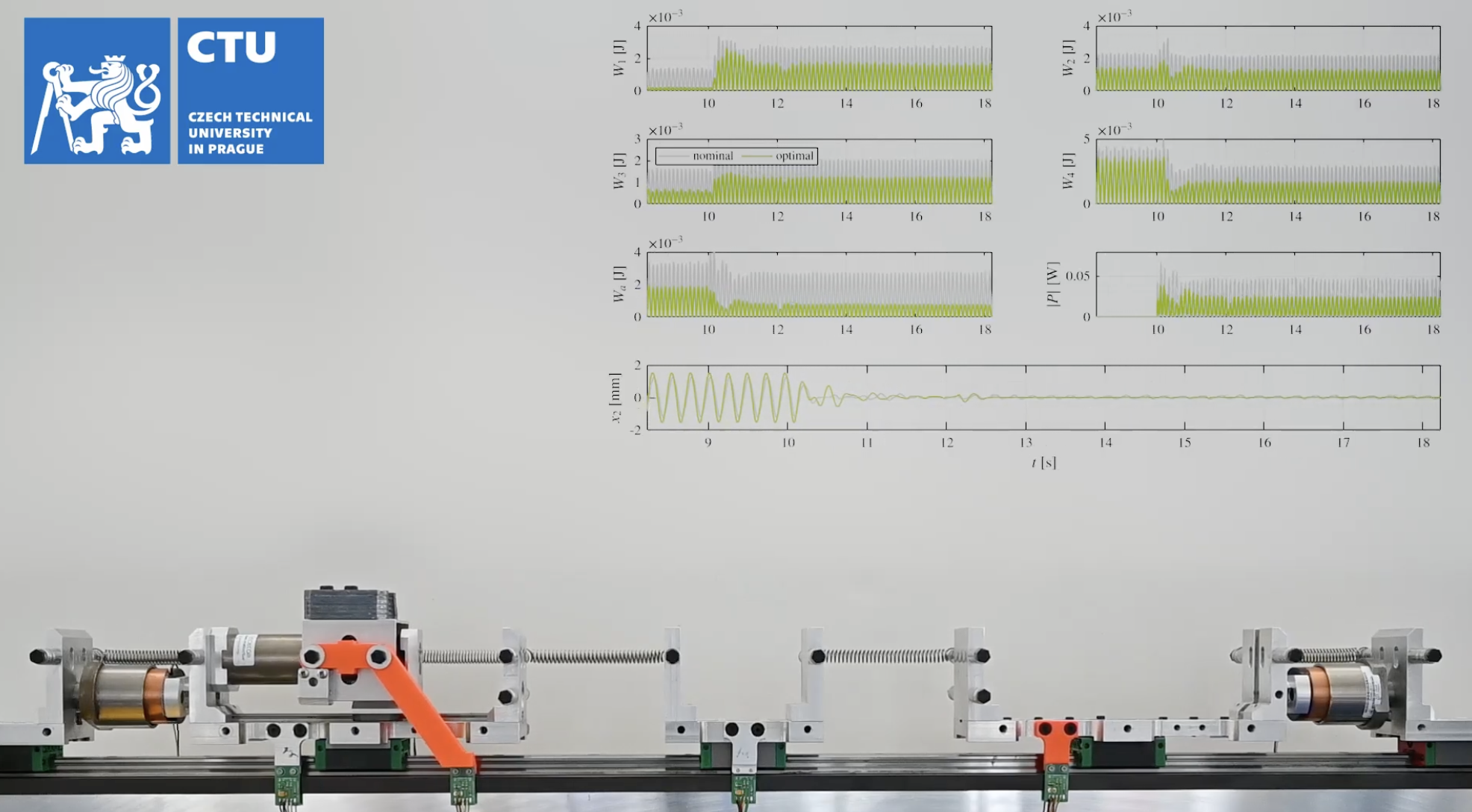
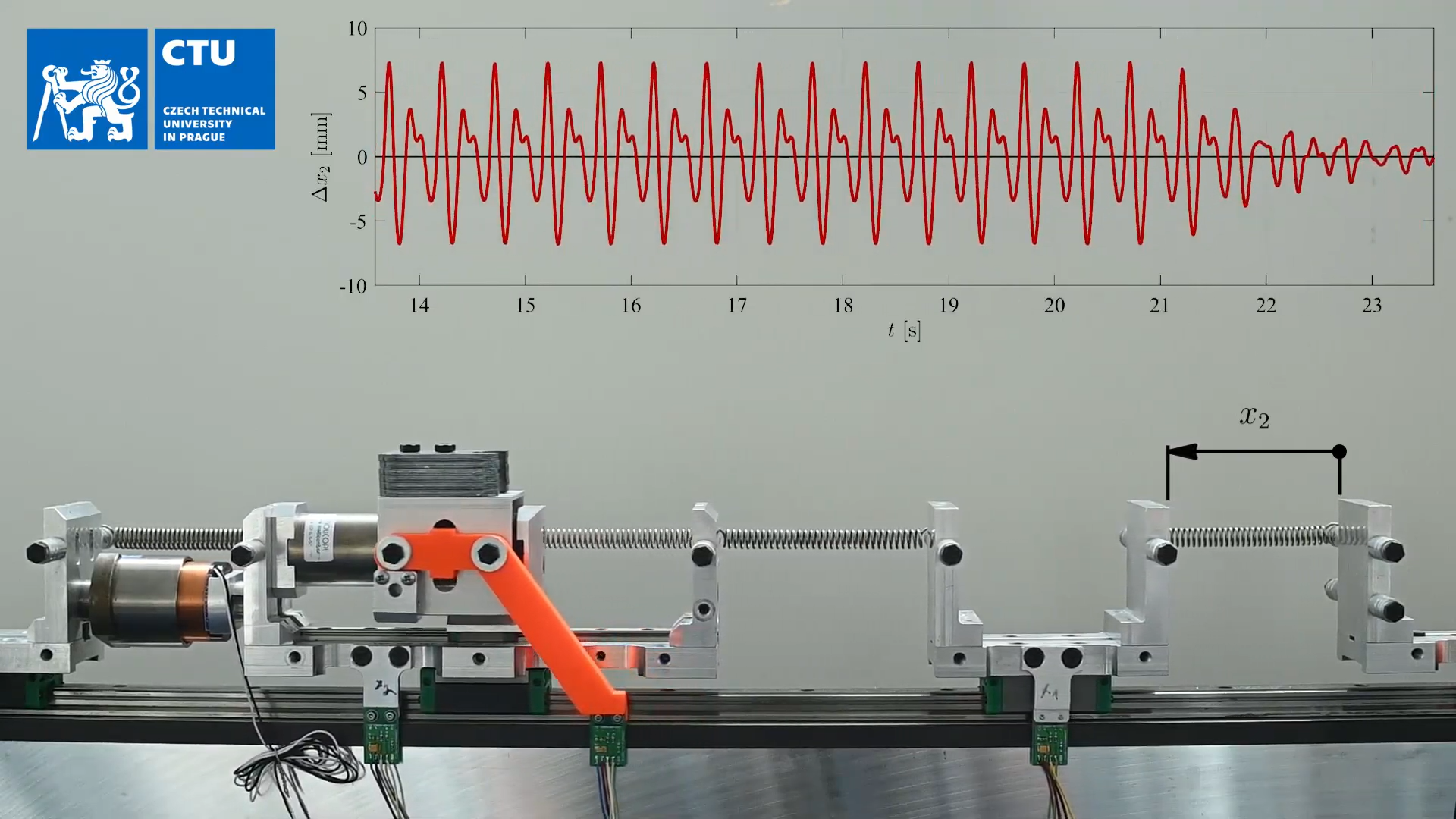
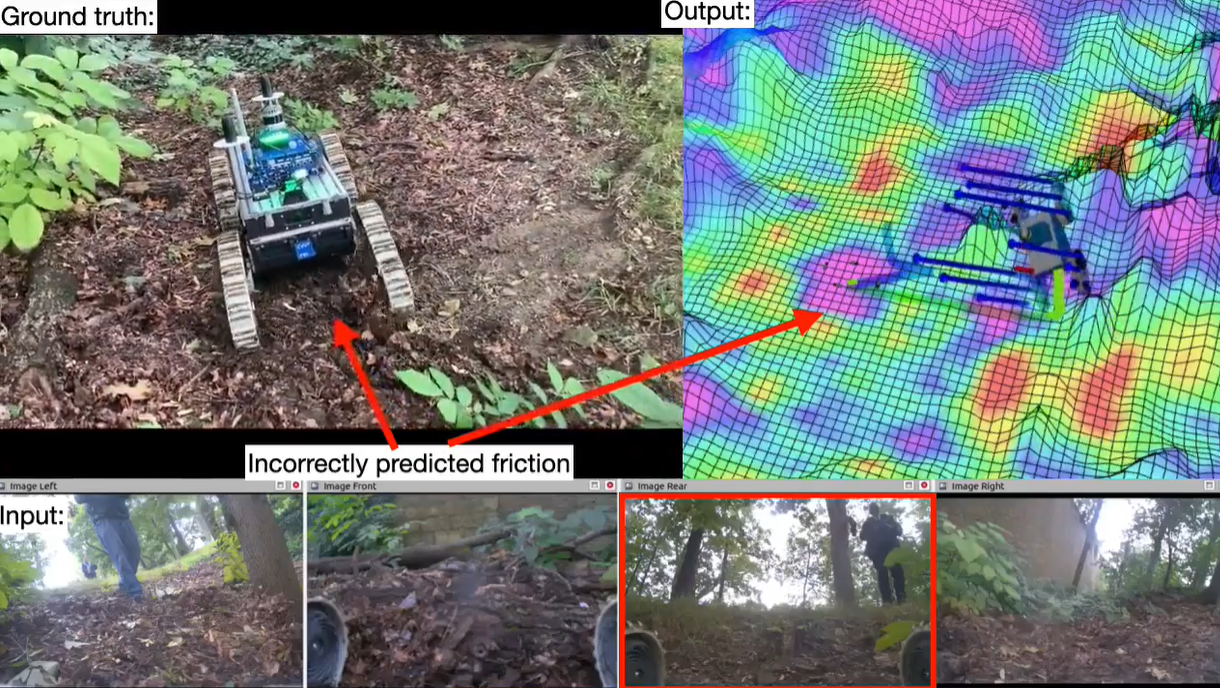
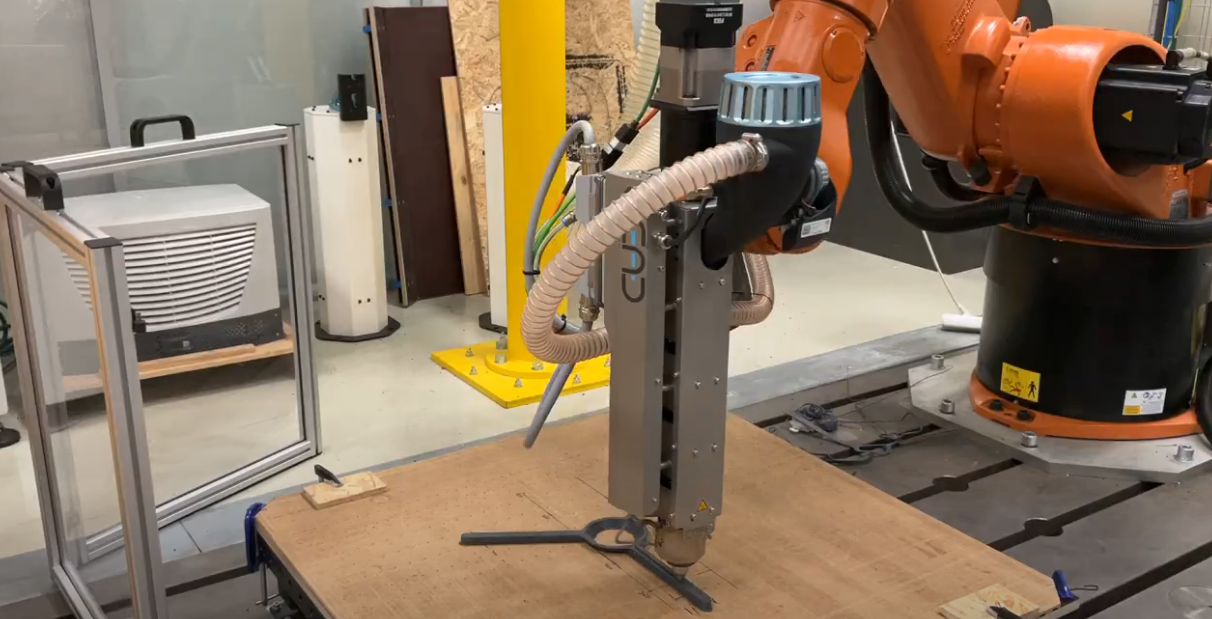
VIDEOS LoL-NMPC: Low-Level Dynamics Integration in Nonlinear Model Predictive Control for UAV RVC-NMPC: NMPC with Reciprocal Velocity Constraints for Mutual Collision Avoidance of Agile UAVs Vision-only UAV State Estimation for Fast Flights Without External Localization Systems Integrated design of system structure with efficient non-collocated vibration absorption Single-rod brachiation robot: Mechatronic design and validation of pre-jump phases A Spectrum based Filter Design for Periodic Control of Systems with Time Delay MonoForce: Self-supervised Learning of Physics-informed Model Storage Bin CEAD – Airtech Dahltram T-100 GF, nozzle 6f Optimization of Robotic Cells 1 2 3