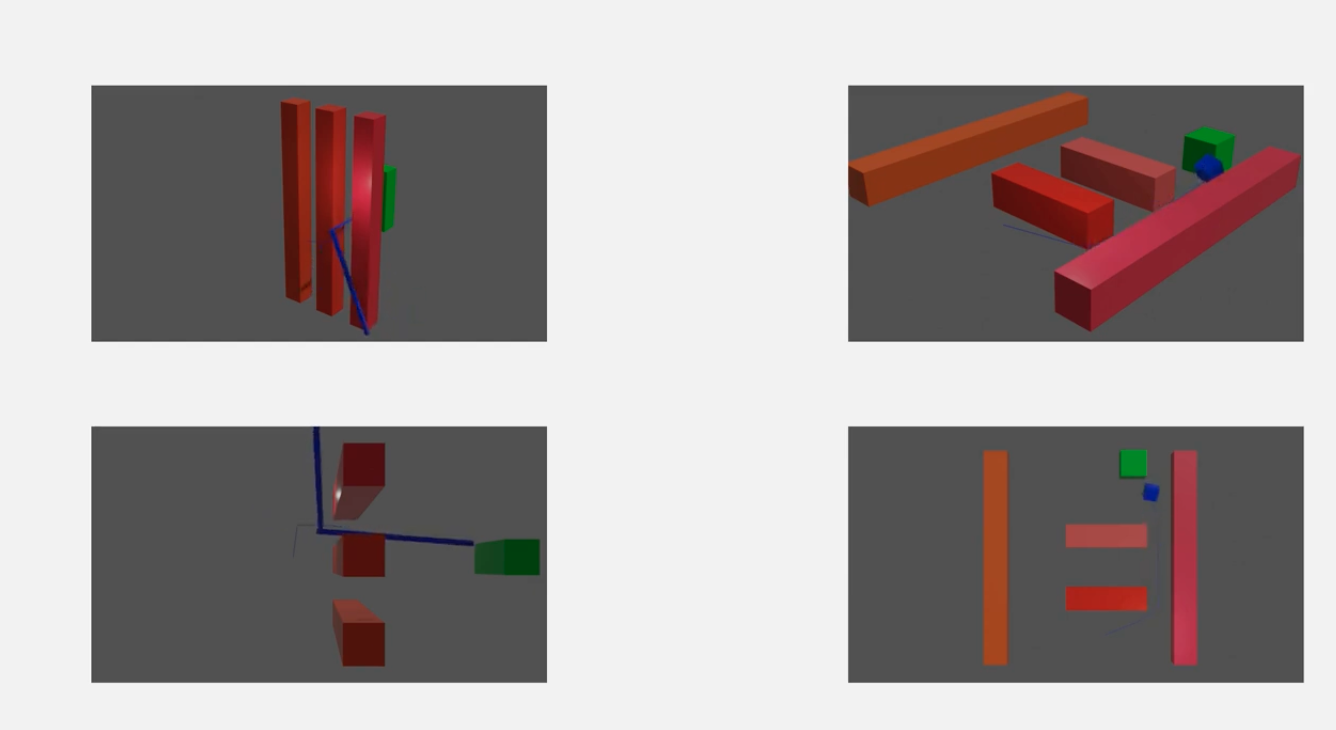
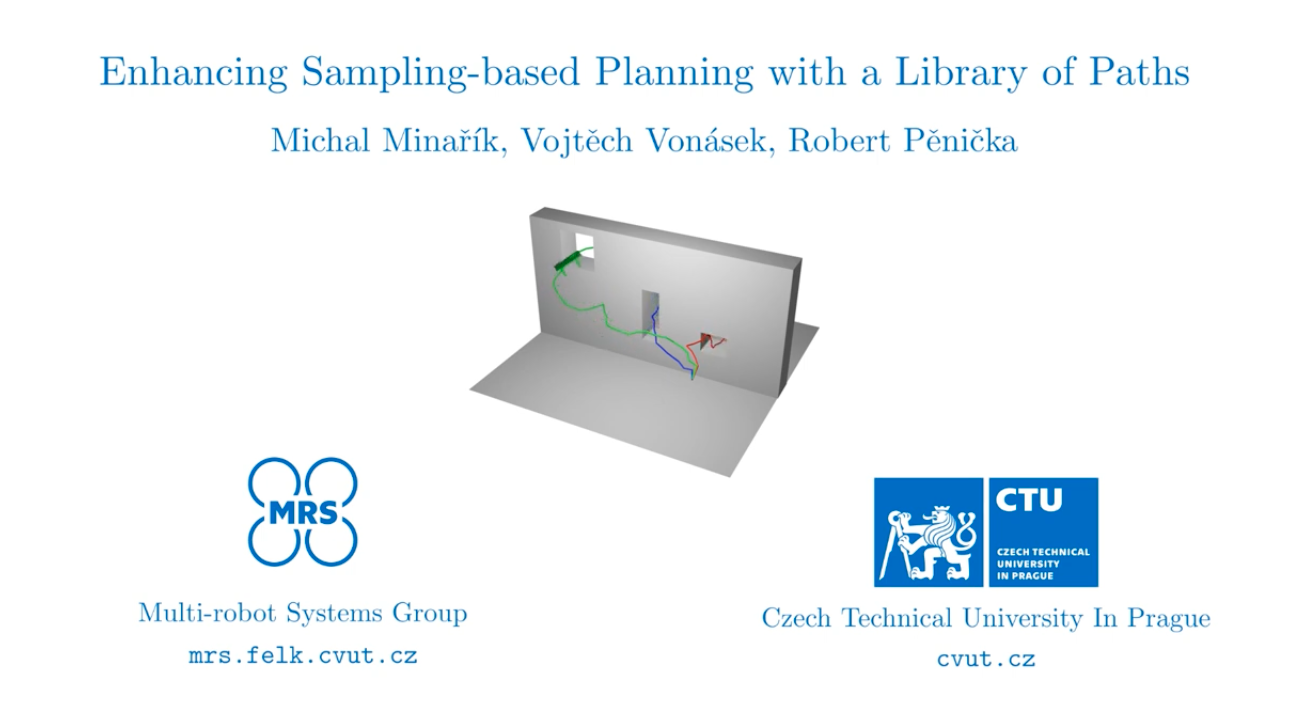
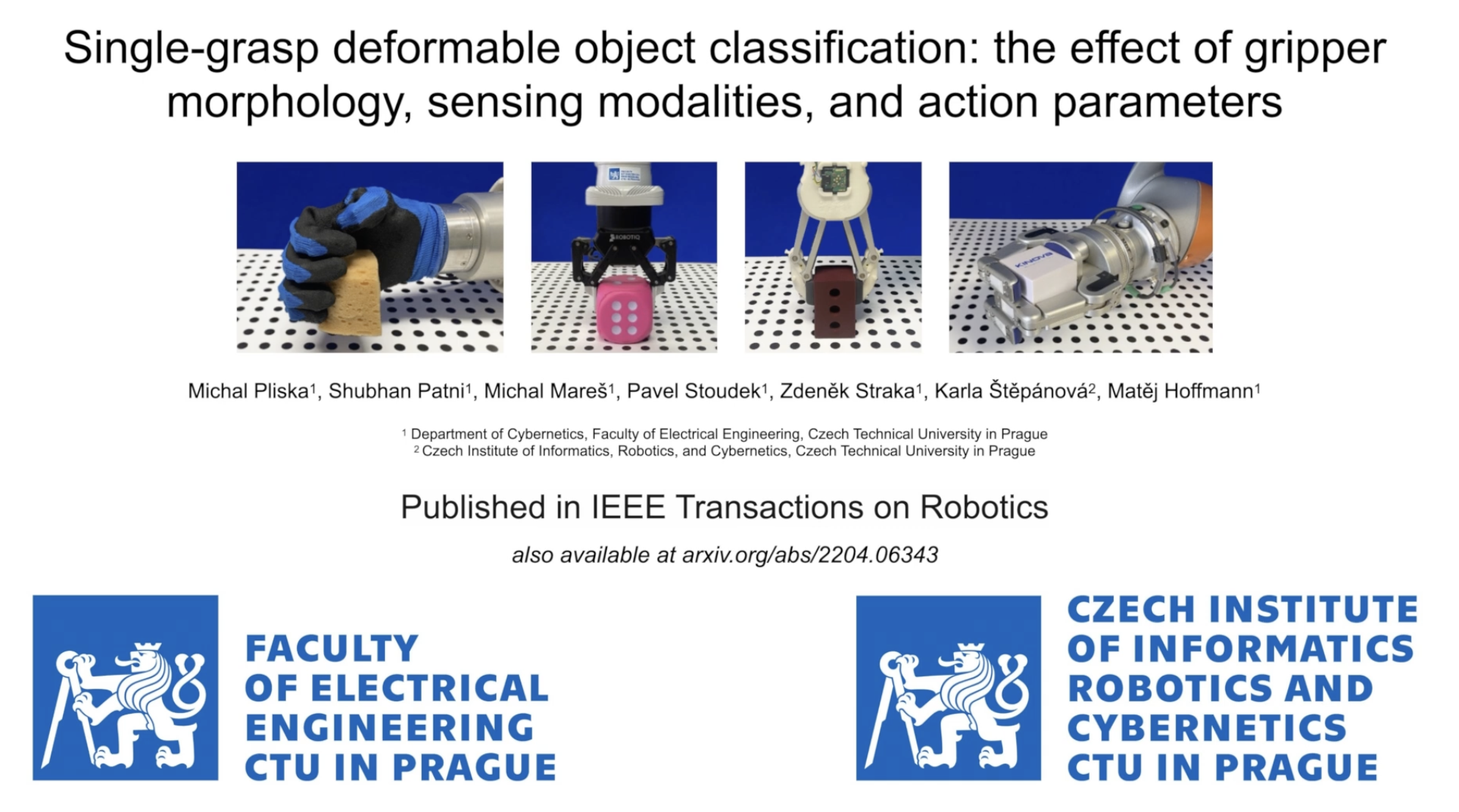
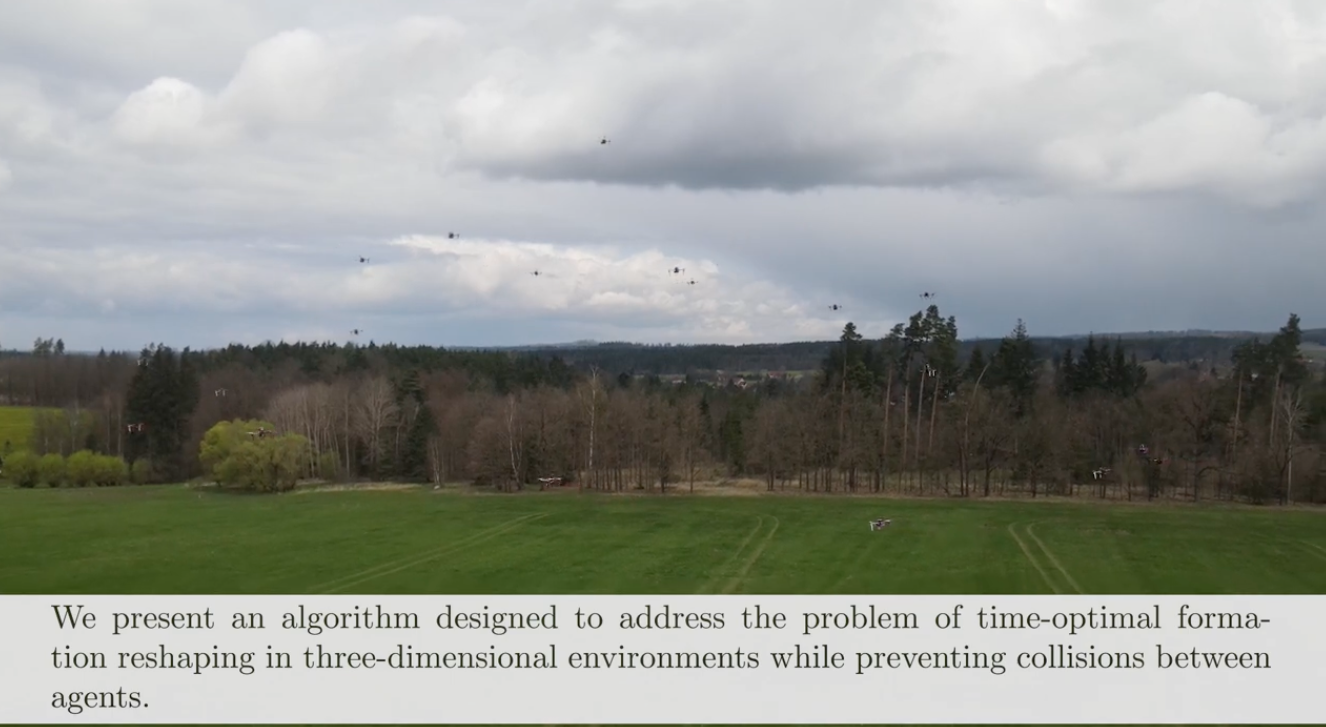
VIDEOS Asymptotically Optimal Path Planning With an Approximation of the Omniscient Set Gesture-Controlled Aerial Robot Formation for Human-Swarm Interaction Enhancing Sampling-based Planning with a Library of Paths Online Material Sorting From Single Grasp with a Robot Gripper Single-grasp Deformable Object Discrimination: Gripper Morphology, Sensing Modalities, and Actions CurviTrack: Curvilinear Trajectory Tracking for High-speed Chase of a USV CAT-ORA: Collision-Aware Time-Optimal Formation Reshaping for Efficient Robot Coordination LoL-NMPC: Low-Level Dynamics Integration in Nonlinear Model Predictive Control for UAV RVC-NMPC: NMPC with Reciprocal Velocity Constraints for Mutual Collision Avoidance of Agile UAVs 1 2