11-12 February 2026 | University of West Bohemia in Pilsen
This year, the ROBOPROX consortium held its annual plenary meeting in Plzeň, attended by around 60 participants from all partner institutions and research areas.
The first day featured a pitching session on open research challenges and work in progress, with seven presentations sparking lively discussions. Informal discussions continued during the joint dinner. The second day was opened by Zdeněk Hanzálek, Principal Investigator of ROBOPROX, and Miloš Železný, Dean of the Faculty of Applied Sciences of the UWB. After administrative matters, presentations from all research areas (RA1–RA13) provided an overview of ongoing activities and project progress.

The annual plenary meeting of the ROBOPROX project: Robotics and Advanced Industrial Production (reg. no. CZ.02.01.01/00/22_008/0004590)
Day 1 – Wednesday 11 Februray 2026
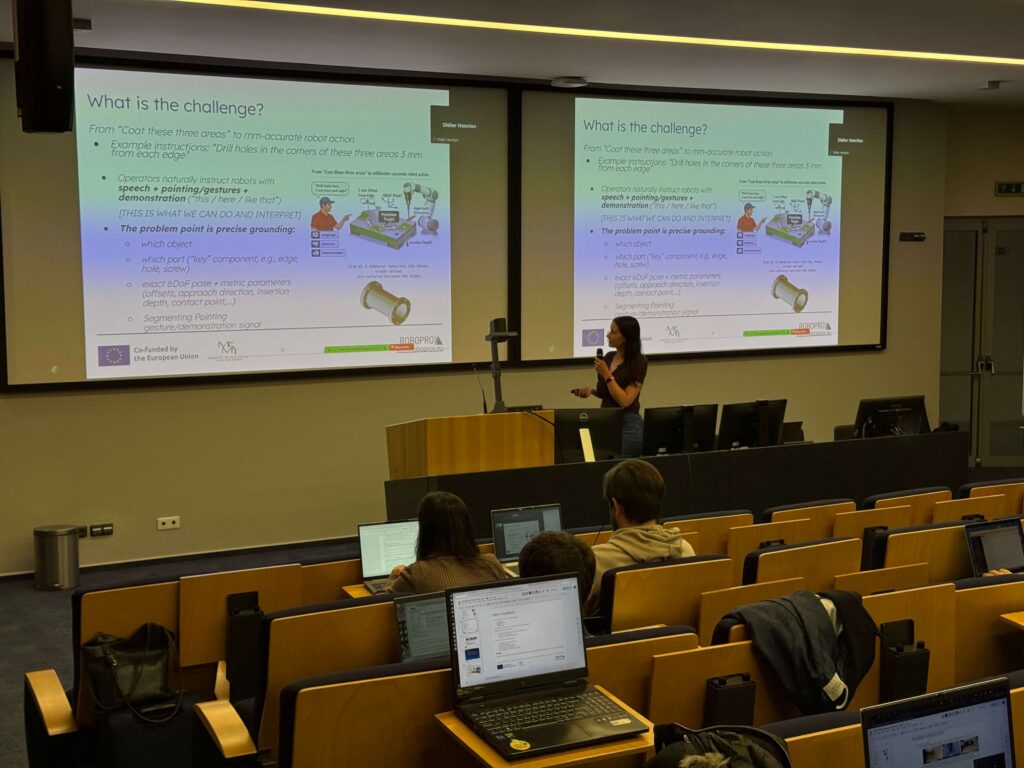
| 14:00–16:30 | Pitching session: Open Research Challenges and Ideas in Progress • E-commerce and Personalized production (Zdeněk Hanzálek) • Human-robot Collaboration via Proprioceptive External Force Estimation (David Valouch) • Precise Object Referencing for Robot Instructions (Karla Štěpánová) • Uncertainty-Aware Fault Probability Smoothing for Online Detection in Electric Drives (Lukáš Zezula, Jakub Dokoupil) • Planning against Nature (Lukáš Chrpa) • Non-negative tensor decompositions (Ondřej Straka) • Thermal camera image processing (Michal Rytíř) |
| 18:00 | Dinner Na Spilce restaurant Enjoy a joint dinner with fellow participants, an excellent opportunity to network and discuss the upcoming meeting sessions. Particiants are kindly asked to cover their own dinner expenses. |
DAY 2 – Thursday 12 February 2026
| 9:00–9:15 | Introduction and Welcome Welcome address by Zdeněk Hanzálek, Principal Investigator of ROBOPROX Host welcome by Miloš Železný, Dean of Faculty of Applied Sciences of the University of West Bohemia |
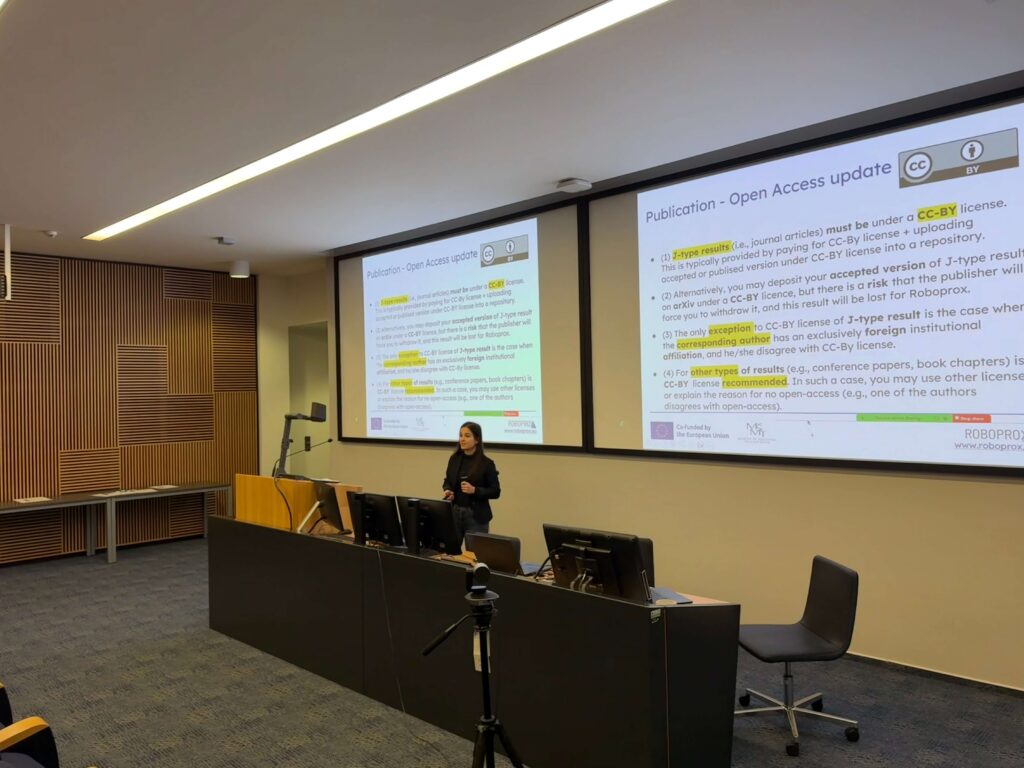
| 9:15–10:15 | Important to Know |
| 10:15–10:40 | RA1 Control of distributed-parameter systems and complex robotic structures – prof. Ing. Tomáš Vyhlídal (25 min) (Slides in PDF | Video recording) – Optimal control of interconnected time-delay systems – Extending the system decoupling method – Control and vibration suppression of light robotic structures – Algorithms for industrial control – Estimation and filtering – Advanced manufacturing |
| 10:40–10:50 | RA2 Control for modular systems, structures, and materials – doc. Ing. Martin Klaučo, MSc., Ph.D. (10 min) (Slides in PDF | Video recording) – Methodology for collaborative assembly of modular structures – Methodology for control of assembled modular structures |
10:50–11:00 Coffee Break
| 11:00–11:10 | RA3 Convex relaxations for non-convex problems in materials and industrial design – Ing. Karolína Sehnalová (10 min) (Slides in PDF | Video recording) – No relaxation gap in the moment-SOS hierarchy – Better scalability of the moment-SOS hierarchy |
| 11:10–11:30 | RA4 Computer-aided design, simulation and manufacturing of (modular) materials, mechanisms, and structures – prof. Ing. Jan Zeman (20 min) (Slides in PDF | Video recording) – Simulations – Optimal design – Manufacturing and validation |
| 11:30–11:45 | RA5 Automation for nanoscale surface engineering – prof. Ing. Tomáš Polcar (15 min) (Slides in PDF | Video recording) – Robotic magnetron sputtering – Automated nanoscale tribology – Design and manipulation of 2D materials |
| 11:45–11:55 | RA6 Advanced robot autonomy – Ing. Libor Přeučil, CSc. (10 min) (Slides in PDF | Video recording) – Robot workspace modelling, robot under uncertainty – Perception-based navigation using embedded workspace features – Long-term autonomy, fault detection and recovery |
| 11:55–12:15 | RA7 Human-machine collaboration – Mgr. Karla Štěpánová, Ph.D. (20 min) (Slides in PDF | Video recording) – Modular knowledge-enabled architecture for HRC – Interactive skill and task specification, learning – Planning, scheduling and execution of tasks in the HRC workspace – Interactive perception – Application to a robotic system for radiation detection |
12:15–13:30 Lunch Break in Menza
| 13:30–13:40 | RA8 Cooperative aerial robots for advanced industrial production – prof. Ing. Martin Saska, Dr. rer. nat. (10 min) (Slides in PDF | Video recording) – Topological multi-modal mapping and cooperative localization – Trajectory and high-level mission planning for agile multi-robot flight |
| 13:40–13:50 | RA9 Resilient machines through continuous learning and sensing – doc. Mgr. Matěj Hoffmann, Ph.D. (10 min) (Slides in PDF | Video recording) – End-to-end learning with explainability – Versatile, resilient robots through distributed reactive control and whole-body tactile sensing |
| 13:50–14:00 | RA10 Robotic routing in dynamic industrial environment with human presence – Ing. David Valouch (10 min) (Slides in PDF | Video recording) – Robotic routing solvers with solution quality estimates – Data collection planning in spatiotemporal fields |
| 14:00–14:25 | RA11 Scheduling, discrete optimization and decision-making – prof. Dr. Ing. Zdeněk Hanzálek (25 min) (Slides in PDF | Video recording) – High-performance algorithms for the novel extensions of production scheduling problems – Uncertainty and machine learning in discrete optimization – Effective decision-making for long-term autonomy – Metaheuristic methods application for large-scale, high-dimensional data – Optimization of energy consumption and production |
| 14:25–14:45 | RA12 Scalable formal methods in robotics and production – Mgr. Mikoláš Janota, Ph.D. (20 min) (Slides in PDF | Video recording) – Scalable symbolic execution through bounded model checking – Automated reasoning for industrial applications – Reasoning about configurable systems – Graphs, parameters, and optimization for agents |
| 14:45–15:00 | RA13 Complex systems for flexible production – doc. Ing. Petr Kadera (15 min) (Slides in PDF | Video recording) – Modularization of production systems – Quality control in flexible manufacturing systems – Products, production systems, and devices |
15:00–15:10 Closing Remarks
Photo gallery