
V létě tohoto roku vystoupil profesor Tomáš Vyhlídal, vedoucí výzkumné oblasti 1 projektu ROBOPROX, s plenární přednáškou na mezinárodní konferenci IFAC SSSC TDS COSY 2025. Ve svém vystoupení představil původní přístupy k potlačování vibrací pomocí zpětné vazby se zpožděním, oblasti, ve které jeho výzkumný tým působící na Fakultě strojní a Českém institutu informatiky, robotiky a kybernetiky na Českém vysokém učení technickém v Praze dosáhl mezinárodně uznávaných výsledků.
S příspěvkem pod názvem “Optimized Active Vibration Absorbers with Time-Delayed Feedback for Non-Collocated and Multi-Dimensional Applications” se profesor Vyhlídal vrátil ke klasickému konceptu Zpožděného rezonátoru pro hlcení vibrací, jehož první koncept vznikl v 90. letech, a představil jeho moderní rozšíření vyvíjená v rámci projektu ROBOPROX a projektů Grantové agentury ČR.
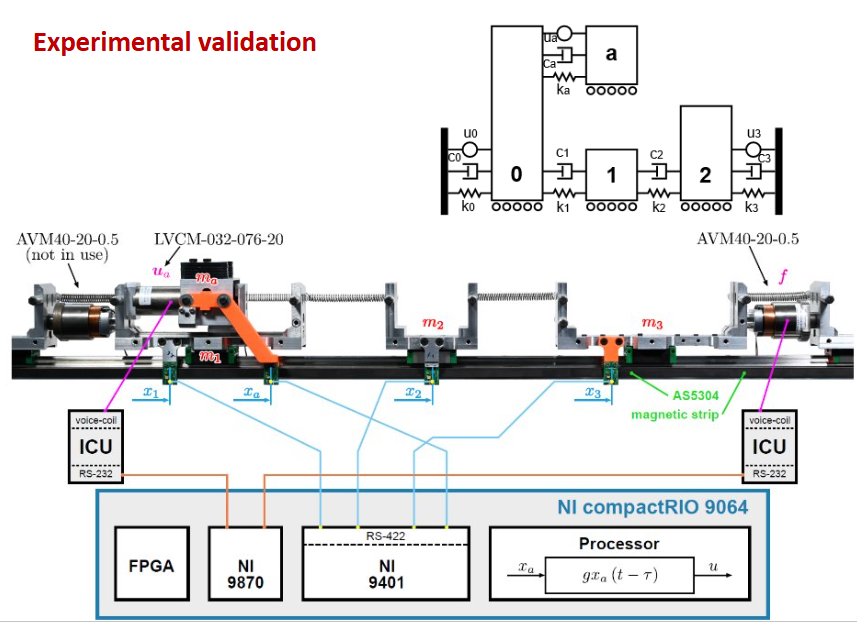
Demonstroval, že přesně nastavené časové zpoždění ve zpětnovazební smyčce umožňuje transformaci aktivního hltiče do ideálního rezonátoru, který dokáže zcela potlačit nežádoucí vibrace na zvolené frekvenci. Přednáška ukázala, jak lze tento princip škálovat od jednoduchých systémů s jedním senzorem a aktuátorem až po složité struktury s více vstupy a výstupy.
Jedna z hlavních částí prezentace byla věnována nekolokovanému hlcení vibrací, tedy potlačování vibrací v cílové části mechanické struktury pomocí aktivních zpožděných rezonátorů umístěných na jiné části struktury. Profesor Vyhlídal představil návrhy založené na optimalizaci pro rovinný hltič vibrací se třemi akčními členy a sdílel první simulační výsledky prostorového hltiče se šesti aktuátory řízenými zpětnou vazbou se zpožděním.
Kromě teoretických přínosů zdůraznil i ty praktické, spočívající zejména v možnosti kompenzace vnitřních (zpětnovazebních) zpoždění. Na rozdíl od tradičního proporcionálně-derivačního (PD) řízení využívá zpožděná proporcionální zpětná vazba pouze měřený signál polohy, bez nutnosti měřit, nebo numericky aproximovat jeho derivaci. Cílem navržených metod je též dosažení robustní stability a snížení únavy materiálu mechanických struktur, což jsou klíčové faktory pro vývoj budoucích chytrých robotických a mechanických systémů.